
Customer
U.S. Air Force Research Laboratories.
Users
Simulation developers, instructors, analysts.
Smarter Simulations Made Simple
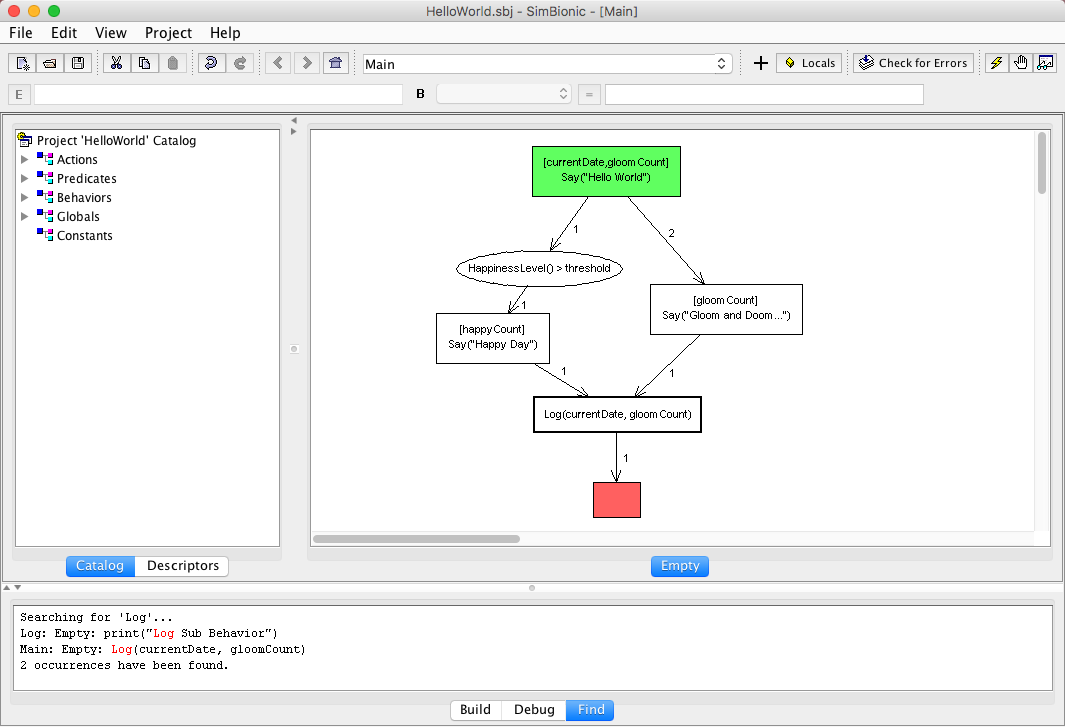
SimBionic® 3.0 is an open source software project that makes it possible to specify real-time intelligent software agents quickly, visually, and intuitively by drawing and configuring behavioral transition networks (BTNs). Each BTN is a network of nodes connected by links (connectors)—similar to a flow chart or finite state machine. Visual logic also makes it easy to show, discuss, and verify the behaviors with members of the development team, subject matter experts, and other stakeholders. BTNs are especially effective for developing tactical decision-making modules, real-time reactive planners, and adaptive execution systems which detect, track, and classify complex sequences of events and state conditions and then take appropriate actions.
Modular Architecture
SimBionic software provides three components. The SimBionic Visual IDE (or Editor) application enables developers to specify intelligent agent behaviors by creating and saving BTNs that are read and executed by the SimBionic Run-time System. This run-time software library can be embedded within a Java® software application to query for state information and execute actions, as specified by the BTNs. The SimBionic Visual Debugger application helps developers test and debug behavior logic by stepping through the execution of the BTNs and inspecting the values of local and global variables.
Powerful Representation Capabilities
SimBionic supports the features necessary to build robust, intelligent, real-time systems. BTNs use JavaScript as their expression language, leveraging the JavaScript engine embedded within the Java run-time system. This allows BTNs to access local and global variables and call JavaScript functions and Java methods. BTNs are hierarchical: a node within a BTN can invoke other BTNs. Hierarchical BTNs simplify the logic of higher-level BTNs by encapsulating details within lower-level BTNs. BTNs can read and write from/to message queues and blackboards to enable agents to cooperate and share information.
Parallel Execution
The SimBionic engine controls one or more entities, each executing its own set of BTNs simultaneously. When using SimBionic to develop a game or simulation, different entities might correspond to simulated characters or computer-generated forces, each acting independently. In a decision support system or intelligent training system, each entity could be an expert object that uses its unique knowledge to detect, track, and classify certain types of events or situations, select and present relevant data, and/or make recommendations.
Simbionic in Action
SimBionic is an enabling technology for numerous innovative training, simulation, and decision support systems. For example, SimBionic controls simulated characters and assesses student performance in PORTS, a simulator developed by Northrop Grumman for training U.S. Navy tactical action officers at the Surface Warfare Officers School (SWOS) in Rhode Island. SimBionic-controlled intelligent agents, rather than instructors, play the roles of simulated crew members, greatly reducing the need for instructors to conduct effective training. SimBionic also evaluates the TAO students’ performance automatically and infers tactical principles that were or were not applied correctly, so it can coach students during scenarios and provide a detailed report card afterwards.
Accolades
SimBionic was honored with a Brandon Hall Excellence in Learning Award for Innovative Technology. SimBionic also helped Stottler Henke win the prestigious Tibbetts Award, given by the U.S. Small Business Administration. The U.S. Air Force recognized SimBionic® as a successfully transitioned technology developed with Small Business Innovation Research funding.
Publications
Publications can be found here: Publications
Open Source
The open source repository SimBionic 3.0 includes the Java code for the Visual IDE, Run-Time System, and Debugger along with a user manual and example models: https://github.com/StottlerHenkeAssociates/SimBionic
More Information
To explore how Stottler Henke can help you create smarter simulations, contact Jeremy Ludwig.